

In today's interconnected world, the ability to track and monitor assets and people in real-time has become increasingly important. That’s where real-time location systems come into play, specifically Bluetooth-based systems utilizing RSSI and/or Bluetooth Direction Finding.
Real-time location systems - or RTLS - can be used to identify and track the location of objects in real time. It uses a combination of wireless communication, sensor networks, and data processing to approximate an object's location - and sometimes - direction.
Prefer video? There's a step-by-step Direction Finding demo and explainer video at the end of this post.
Asset Tracking
Asset tracking with RTLS allows for real-time monitoring and management of movable assets in many environments. Consider scenarios like nurses locating medical equipment in hospitals, keeping track of the locations of high-value manufacturing assets throughout the supply chain, or locating specific pallets within a warehouse.
Asset Tracking Scenario
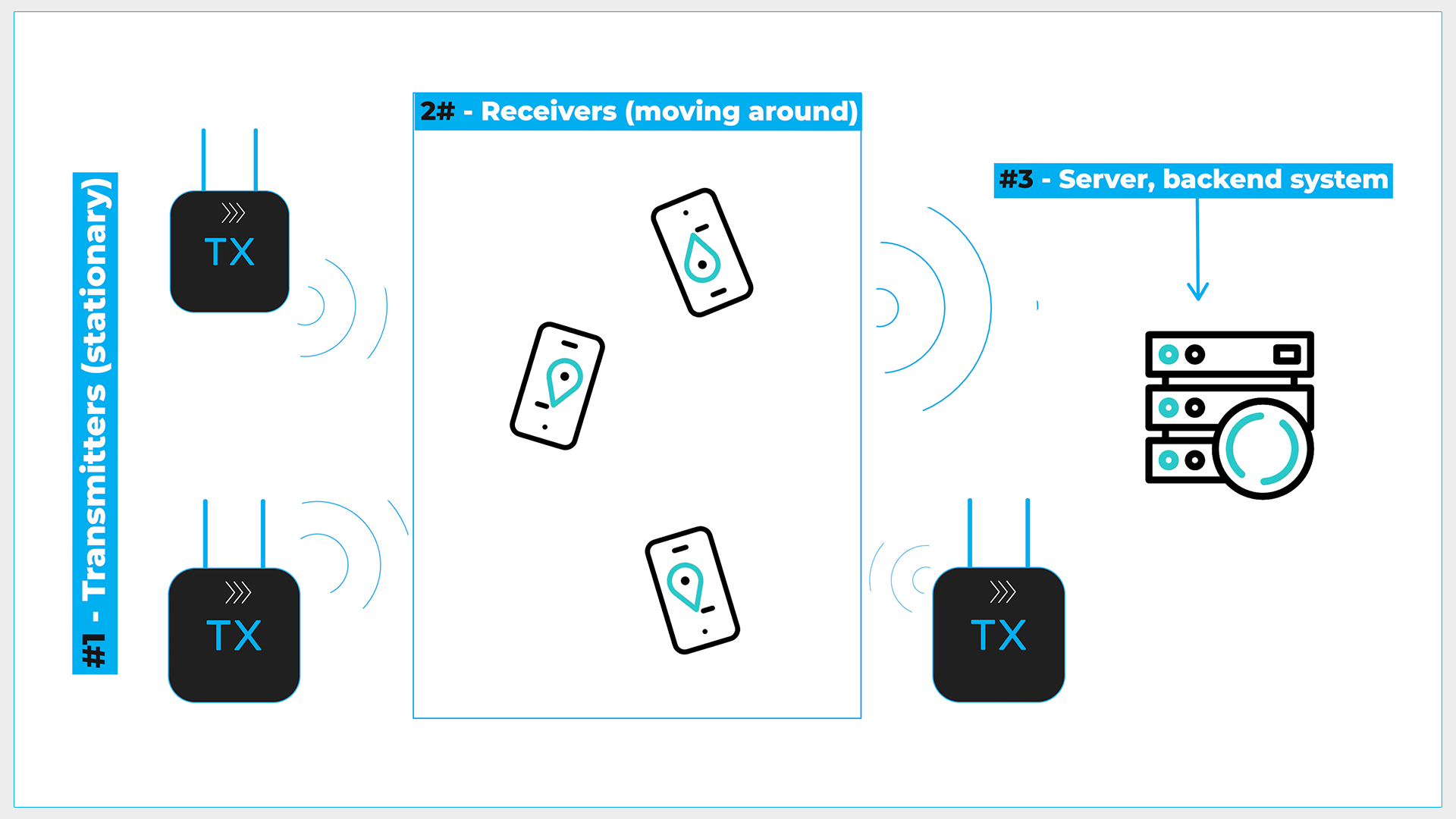
In the asset tracking scenario, you have three distinct components:
- Transmitters (aka tags): typically moving beacons that are attached to the assets being tracked.
- Receivers (aka readers or locators): stationary Bluetooth devices (i.e., anchors) that relay information about the moving beacons via ethernet, Wi-Fi, or cellular up to a central server.
- Server: as this central backend system receives information from the receivers, it uses it to approximate the location of the moving beacons. It can then project those locations on a map showing the tracked assets.
Indoor Navigation
Indoor navigation systems (aka indoor positioning systems) are very similar to RTLS solutions but with a different goal: to enable users to find their way inside buildings or facilities where GPS signals are weak or nonexistent.
Indoor Navigation Scenario
In this scenario, you also have three components:
- Transmitters: stationary beacons deployed in specific positions within a facility where an indoor navigation system is being set up.
- Receivers: typically mobile phones, but could also be specialized devices designed to accept the information from the stationary beacons. The key thing to understand here is that the receivers move with the person who wants to utilize the navigation system. The receivers will relay information to the backend server via Wi-Fi or cellular.
- Server: these will do the actual location calculations based on the information received from the receivers.
Bluetooth RTLS (Bluetooth Location Services)
Bluetooth LE is increasingly being used for RTLS due to its:
- Wide availability
- Low cost
- Long battery life
- Relatively long range, especially compared to some alternatives like RFID
So far, we’ve been talking about RTLS in a general sense to give you a framework for understanding what they are used for - and how they are typically configured. But RTLS is just that - it is a general term describing many different location tracking systems.
Depending on the specific application, requirements, and project constraints, one or more techniques will be used to actually do the location approximation and direction finding within an RTLS. The two techniques that we will look at are RSSI and Direction Finding.
We’ll start with RSSI because it is, by far, the most commonly used methodology and will work for a majority of RTLS applications.
Received Signal Strength Indicator (RSSI)
So, first of all, what is RSSI? RSSI stands for received signal strength indicator and measures the strength of a received radio signal in a wireless communication system. In the context of RTLS, RSSI-based location estimation is based on the strength of the signal sent from the transmitter - or transmitters - to the receiver - or receivers. In reality, this works differently depending on the specific use case.
For simple proximity applications, just one receiver could be used. In an asset tracking scenario where proximity information isn’t sufficient, and you need to estimate the actual location of an asset, you would need to use three or more receivers or locators and rely on the trilateration and the path loss model to estimate the transmitter’s location relative to the receivers.
When comparing that to an indoor navigation scenario, three or more Bluetooth beacons would be needed to accurately locate the receivers: smartphones or other Bluetooth LE devices used for navigation.
Recall how asset tracking systems are set up, with a transmitter attached to an asset. But imagine that instead of having just one stationary receiver in a warehouse, you have 10. In this case, the receivers would pass the signal strength information on to the server. The server would generally then use a trilateration algorithm to approximate the location of the asset.
As I mentioned, RSSI is very commonly used in RTLS systems mainly because of its simplicity and cost-effectiveness. This simplicity does come with a cost; RSSI can be inaccurate. It is very susceptible to noise and obstacles in the environment, particularly the signal's line of sight.
RSSI Advantages
- General simplicity
- Minimal hardware requirements - simple RSSI system could be set up with just a single locator for monitoring one or more beacons, with some limitations
- Compatible with smartphones, which can be used as readers in the RTLS
RSSI Limitations
- Only provides approximate location information.
- Can't provide information about what direction a device is located relative to the locator
- Lack of accuracy
RSSI Accuracy
Because RSSI is based on signal strength, anything in the environment that could affect the signal’s strength will reduce the accuracy of the distance and hence location calculation. A few notable things that can reduce the accuracy of RSSI are:
- Environmental factors like humidity
- Interference from other wireless devices
- Multipath propagation phenomenon which occurs when radio signals bounce off surfaces and arrive at the receiver from multiple directions
- Signal attenuation, which is a weakening of the signal as it passes through objects or travels over long distances
Now, remember that even though all of these factors can degrade the accuracy of the RSSI calculation, for most applications, RSSI’s accuracy will be good enough.
When is RSSI Not Good Enough?
But, let’s say the assets you want to track are very small and therefore require a higher degree of accuracy to locate effectively, or you’re tracking assets that are used in emergency situations where you want to reduce the risk of low accuracy. In situations like this, RSSI may not be the right choice - or at least not on its own.
Another major consideration is, of course, Bluetooth direction finding. RSSI will give you the approximate distance a transmitter is away from the receiver, but it will not tell you which direction it is away from the receiver. In other words, let’s say you have a warehouse with one receiving device in the center of each room and a transmitter attached to a high-value asset.
RSSI could tell you which room the asset is in, but it wouldn’t be able to tell you where exactly in the room it is, or even in which direction it is relative to the receiver.
Also, consider an access control system where Bluetooth Low Energy is used to unlock the door as a person approaches it from the outside. In this case, RSSI would not be sufficient because it would only tell you if the person is near the door, not on which side of the door they are in. You would need direction information to detect if a person is approaching the door from the outside.
There are many other potential scenarios where high accuracy, direction information, or both are required. In these scenarios, you’ll want to consider using direction finding instead of, or maybe in conjunction with, RSSI.
Bluetooth Direction Finding
What is direction finding exactly? The Bluetooth Direction Finding feature is used to estimate the direction of a Bluetooth signal from a transmitter to one or more receivers. To understand device direction, it relies on Angle of Arrival (AoA) or Angle of Departure (AoD) methods.
Angle of Arrival (AoA)
In the Angle of Arrival method, multiple antennas are placed at the receiver side, typically a fixed device like an access point or gateway. These antennas capture special direction finding data, called Constant Tone Extension (CTE), sent by the transmitter.
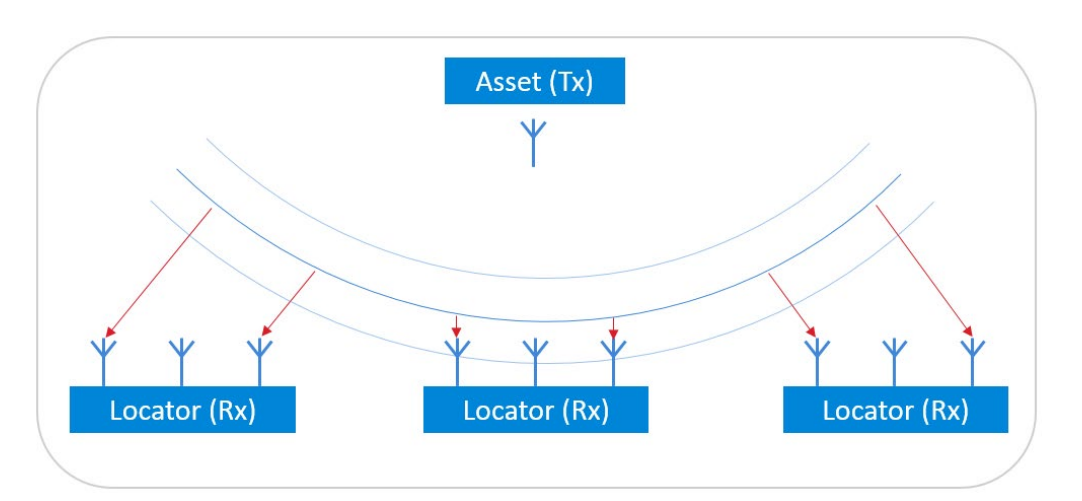
AoA Architecture (Source: Silicon Labs - UG103.18: Bluetooth® Direction Finding Fundamentals)
The CTE is a continuous, unmodulated signal appended to a standard Bluetooth LE packet. This continuous tone is used to accurately measure the phase difference between the received signals, the critical data used to calculate the relative signal direction.
Angle of Departure (AoD)
In the Angle of Departure method, the transmitter has multiple antennas, while the receiver has a single antenna. The transmitter transmits the special direction finding signal from different antennas in a known pattern or sequence. The receiver measures the phase difference between the received signals to determine the AoD.
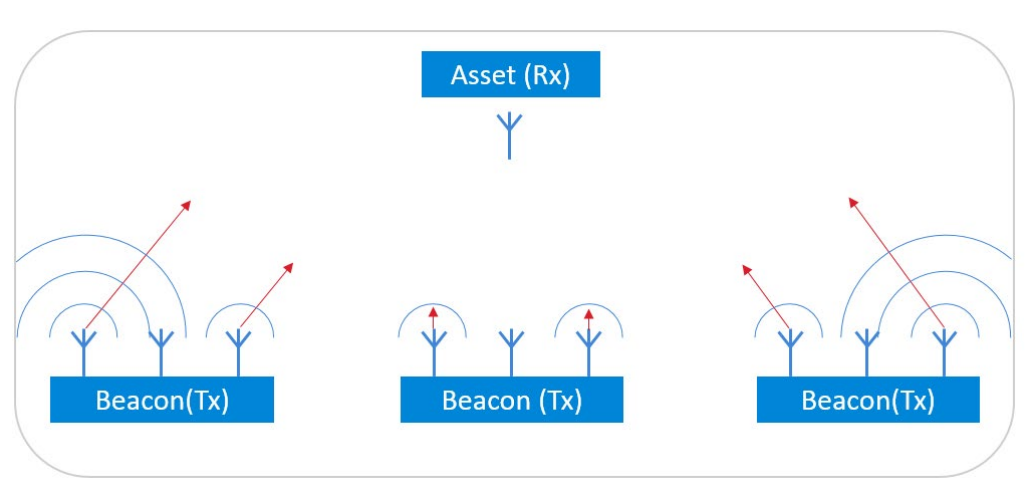
AoD Architecture (Source: Silicon Labs - UG103.18: Bluetooth® Direction Finding Fundamentals)
Similar to AoA, the CTE that is appended to the standard Bluetooth LE packet provides a clear, continuous signal, which can be more precisely analyzed for phase differences or antenna sequencing. This then helps to improve the accuracy of the Bluetooth device direction.
Direction vs. Position Information
It’s important to note that when only one receiver is used in a direction-finding system, it works like a compass application, where only the direction of the transmitter is calculated, but not its exact position. This is because a single antenna array cannot provide accurate distance information about the asset or account for its potential movement in a two-dimensional plane.
To accurately determine the position of the transmitter, two or more receivers with antenna arrays are needed. By using two or more locators equipped with antenna arrays, the transmitter’s position can be pinpointed through a process known as trilateration. In this method, the asset's location is identified at the intersection of lines drawn in the directions determined by the direction-finding algorithm. When multiple receivers are used, high-precision timing synchronization must be used to ensure accuracy. For even higher accuracy position estimation, it can be combined with RSSI measurements.
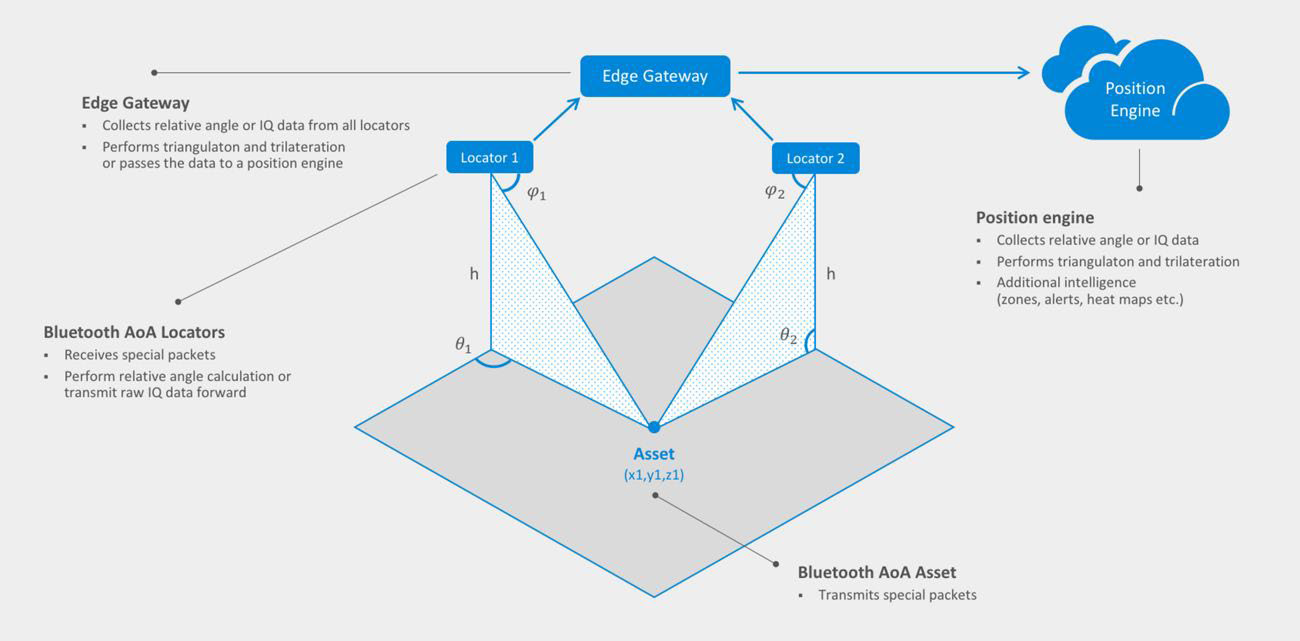
Asset Positioning using AoA with Multiple Antenna Arrays (Source: Silicon Labs - UG103.18: Bluetooth® Direction Finding Fundamentals)
Factors Affecting Direction Finding Accuracy
I’ve already mentioned that Direction Finding-based location estimation provides greater accuracy than RSSI. However, there are still several factors that can affect the accuracy of Bluetooth location services solutions that utilize direction finding:
- Environmental factors like multipath propagation and reflections.
- Interference from other wireless devices
- Placement of the antennas and configuration of the receivers c
- The sophistication of the signal processing algorithms
Direction Finding Advantages
- Higher accuracy than RSSI-based systems, particularly in environments with significant interference and physical obstacles
- It can function well even in the absence of a clear line of sight between the transmitter and receiver
- Can provide valuable direction data for locating devices, which is not possible to obtain with an RSSI-based system, especially using a single locator device
- In some situations, such as locating a single device within a specific area, direction finding could be less complex than RSSI, which often requires multiple receivers or anchors and complex algorithms to determine the location
- It may be less prone to false positives compared to RSSI-based systems
Direction Finding Limitations
- Generally requires more sophisticated and expensive hardware compared to RSSI-based systems
- Due to the need for antennas, Direction Finding systems can be more complex to calibrate and configure, often requiring additional expertise that wouldn’t normally be needed to implement an RSSI-based system
- Multiple receivers are required if you want to pinpoint a device’s location and not just its direction
- It is not currently compatible with smartphones, although this could change as the technology becomes more widely adopted in the future
Direction Finding Explainer Video & Demo
Would you like to get more in-depth on this topic? Want to see how Direction Finding works in practice?
Then check out my recent YouTube video, where I go into much more detail and walk through a step-by-step Direction Finding demo using the Silicon Labs BG22 Bluetooth Dual Polarized Antenna Array Pro Kit (BG22-PK6022A).


